





查看
项目取得了进展
(
日前团队分享了这一项目的最新进展。其中,通过利用宝马的惯性运动传感器IMU数据,
VR头显配备了诸多传感器,但移动车辆构成了一个棘手的挑战,因为诸如
在移动环境中,亦即在非惯性参考系中,这两种模式会产生冲突,因为摄像头观察相对于汽车内部的运动,而惯性运动传感器则测量相对于世界的加速度和旋转速度。这种不匹配意味着诸如MetaQuest2这样的VR头显目前无法在车辆转弯或加速时显示稳定的虚拟内容。
但经过一番努力,Meta和宝马的研究人员成功将宝马汽车传感器阵列的IMU数据实时整合到ProjectAria眼镜的追踪系统中,并允许系统能够计算出眼镜相对于汽车的位置。
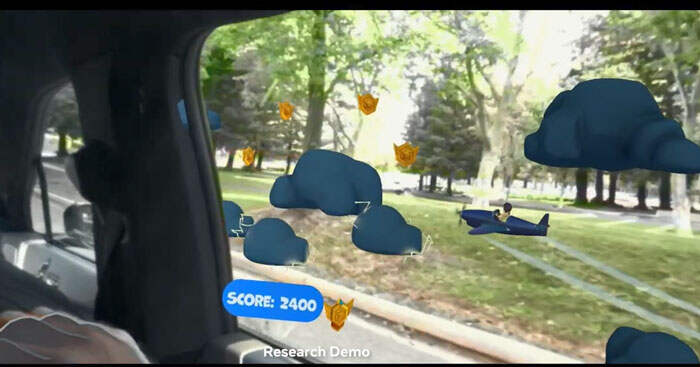
这是一个巨大的壮举,因为在将所述追踪系统转移到MetaQuestPro之后,它允许系统使用汽车的数字孪生来准确地将虚拟对象固定在移动的汽车之上。实际上,团队已经能够使用这个全新的追踪系统和MetaQuestPro,并在移动的汽车中展示混合现实乘客体验。







