





查看
移动机制
(
所以,移动机制一直是行业在重点探索的方向。在名为“Virtualrealitylocomotionviahandgesture”的专利申请中,Meta的研究人员提出了一种有趣的移动机制:通过手势来实现移动。
例如,用户可以利用手势单独控制向前/向后移动,以及用户移动后所面对的方向。在一个实施例中,用户可以做出拖动手势,并由VR系统以X/Y平面进行解释。拖动手势可以形成从原点到目标点的矢量。矢量的长度可以指定移动的速度。矢量相对于Y轴的角度可以指定任何转动量。
通过这种方式,用户可以在不转动的情况下向前移动,或者在不向前移动的情况下原地转动。另外,用户可以在控制速度的同时向前移动和转动。所有这一切都只需一个手势。
简单来说,原本用户是通过Touch控制的按钮操作来进行远程传送,但现在可以换成由手势实施。其中,用户可以发起远程传送手势,通过手势操作选择目的地,通过手势选择瞬移至目的地的速度,以及通过手势瞬移至目的地后的身体朝向。
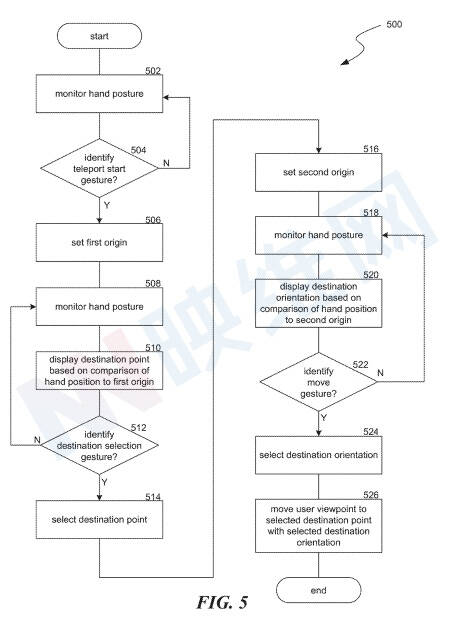
图5示出了通过手势进行移动的流程图。在方框502,过程500可以在人造现实环境中监测用户的手势。过程500可以连续或周期性地监视用户手势。可以以不同的方式监控手势,包括外部摄像头或内置摄像头。在一个实施例中,可以使用启发式或规则来分析输入,以识别用户手势。
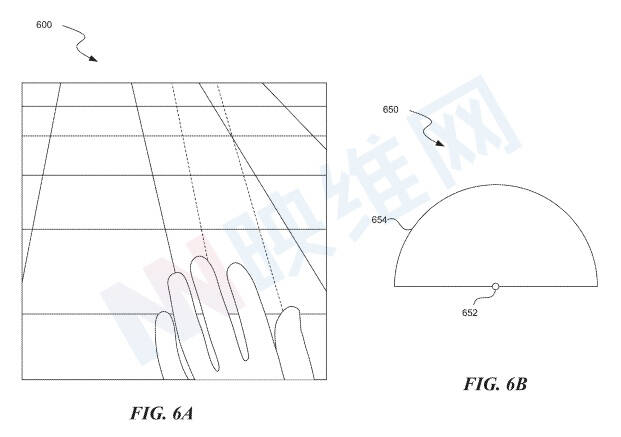
在框504,过程500可以基于监视手势来识别用户是否做出了远程传送开始姿势。其中,远程传送开始姿势的示例如图6A所示)。在一个实施例中,远程传送开始姿势由用户选择或由人造现实系统预先选择,例如如手掌朝上张开。当识别出传送开始姿势时,过程500可以继续到框506。
在框506,过程500可以在识别远程传送开始姿势的位置设置第一原点,如由图6B的原点652所示。原点可以是用户开始移动手的起始位置。在一个实施例中,过程500可以使用原点作为参考位置来比较未来用户手部移动的位置。在框508,过程500可以在人造现实环境中监视用户的手势。
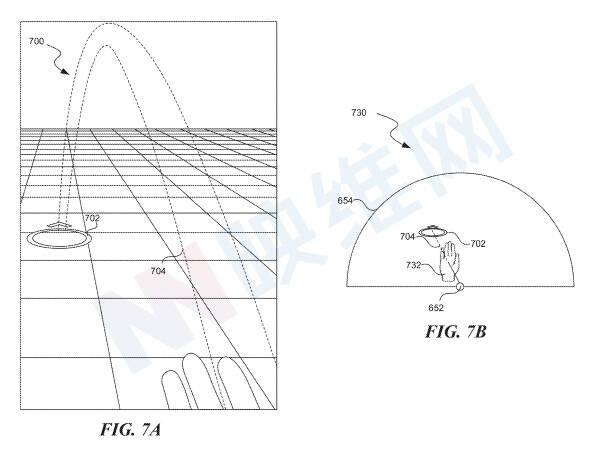
在框510,过程500可以基于第一手位置与第一原点的第一次比较,在人造现实环境中显示目的地,如图7A的目的地702所示。图7B比较了手部位置732与工作半径654中的原点652。在一个实施例,目的点702与从原点652到手部位置732的距离具有指数关系。
在其他实施例中,目的点702与从原点652到手部位置732的距离具有线性关系。目的地702可以通过射线704连接到手部位置732。例如,过程500可以将一条有角度的向下射线从用户的手投射到目标点。
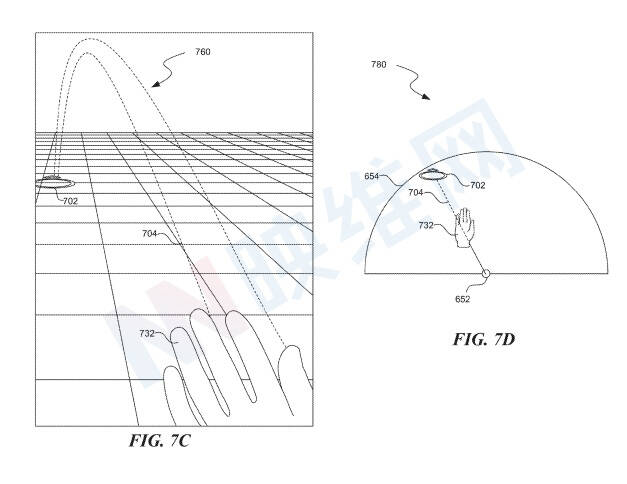
图7C的环境760和图7D的环境780说明了终点702与从原点652到操作半径654中的手部位置732距离呈指数关系。例如,手部位置732和终点702之间的距离可以指数地大于手部位置732到原点652的距离。

在框512,过程500可以基于监视用户手势来识别目的地选择手势,例如将手指捏合在一起。当识别出目的地选择手势时,过程500可以继续到框514。图8A示出了在环境800中选择目的地点702的目的地选择手势802。
在方框514,过程500可以在做出目的地选择手势时,基于所显示的目的地点的位置选择目的地点。在框516,过程500可以在目的地选择手势的位置设置第二原点。第二个原点可以是目的地和新的起始位置,用户从所述位置开始移动手部,以指示目的地方向。
在一个实施例中,过程500可以使用第二原点作为参考位置,以比较用户手在第二原点周围的移动位置,从而确定目的地点处的方向。图8B示出了环境850中的第二原点852。在方框518,过程500可以监视用户在人造现实环境中的手势。
在框520,过程500可以基于第二手部位置,与在框516处设置的第二原点的第二次比较来确定目的地方向。目的地方向可以指示用户在远程传送后将面向的方向。

图9A示出了环境900中的目的地点702的目的地方向902。在一个实施例中,用户可以通过相对于第二原点移动手来改变目的地方向。图9B示出了相对于第二原点852定位目的地选择手势802,从而确定与箭头952相对应的环境950中的目的地方向902。
在方框522,过程500可以基于监视用户的手势来识别移动姿势,例如释放用户手指捏在一起的图形。当识别出移动姿势时,过程500可以继续到方框524。在框524,当识别出运动姿态时,过程500可以基于确定的目的地方向选择目的地方向。在框526,过程500可以将用户的视点移动到具有所选目的地方向的所选目的地点。
在一个实施例中,手势(例如远程传送开始和结束手势、目的地选择手势、移动手势等)由用户的一只手或两只手执行。例如,用户可以用一只手执行手势来选择目的地,或可以用另一只手执行手势来选择目的地方向。
MetaPatent|Virtualrealitylocomotionviahandgesture
名为“Virtualrealitylocomotionviahandgesture”的专利申请最初在2020年12月提交,并在日前由美国专利商标局公布。







