查看
利用外设(眼镜盒)来帮助诸如AR眼镜等设备执行高精度深度测量的方法







2022-12-19 12:10:36来源:YiVian
查看
利用外设(眼镜盒)来帮助诸如AR眼镜等设备执行高精度深度测量的方法
(
然而,立体深度测量对立体摄像头的位置和取向的变化敏感,一个摄像头相对于另一个摄像头的位置和/或方向的偏差可能导致错误的深度测量。
在名为“Depthsensingviadevicecase”的专利申请中,
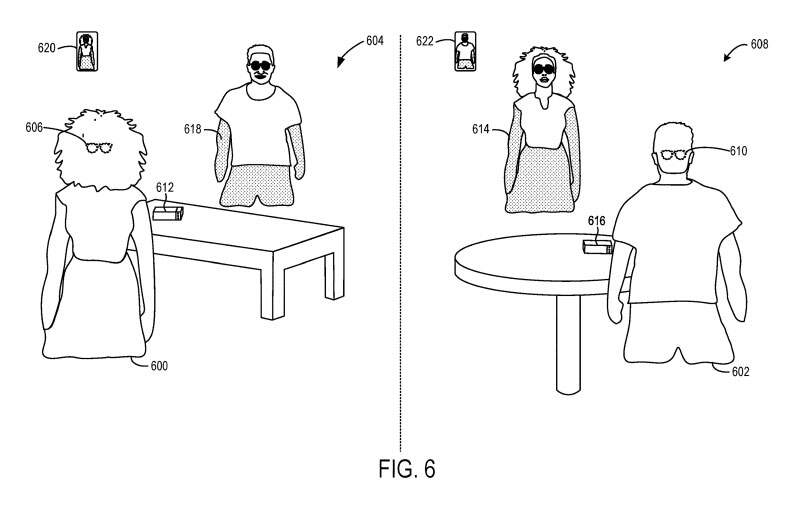
图6示出了第一用户600和第二用户602参与全息通信会话的场景。第一用户600位于第一真实世界环境604中并佩戴第一AR眼镜606。第二用户602位于第二真实世界环境608中并佩戴第二AR眼镜610。
用于第一AR眼镜606的第一外设612定位为捕获包括第一用户600的深度图像的深度数据,以及包括第一用户的可见图像的纹理数据,纹理数据映射到深度数据,使得纹理数据可以应用到深度数据以生成第一用户614的全息图,并经由第二AR眼镜610显示给第二用户602。
用于第二AR眼镜610的第二外设616同理,使得第一AR眼镜610可以显示第二用户602的全息图。
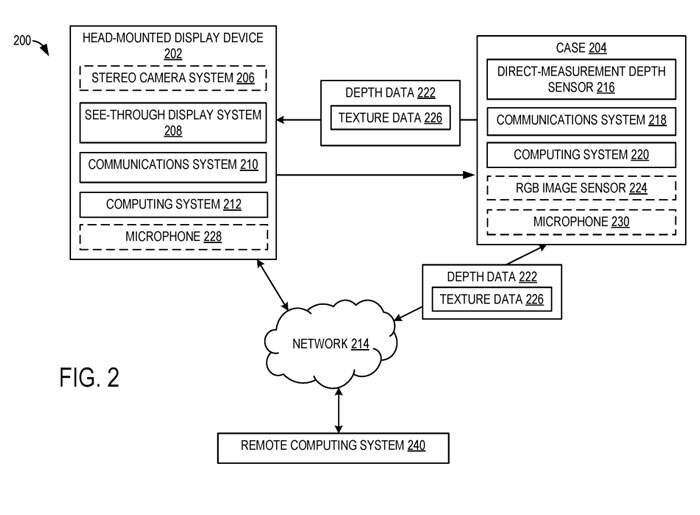
图2示出了包括头显202和外设204的示例系统200框图。头显202可包括深度传感器,例如立体摄像头系统206。头显204同时包括透视显示系统208、第一通信系统210和第一计算系统212。第一计算系统212配置为经由透视显示系统208控制图像的显示,并经由第一通信系统210控制与外设204的通信。在一个实施例中,外设204和头显202彼此直接通信。在其他示例中,外设204和头显202经由网络214通信地耦合。
外设204包括直接测量深度传感器216、第二通信系统218和第二计算系统220。第二计算设备220配置为控制直接测量深度深度传感器216以获取真实世界环境的深度数据222,并控制第二通信系统218将深度数据222发送到头显202。然后,头显202可以至少基于由直接测量深度传感器216输出的深度数据222来显示全息图。
在一个示例中,外设同时可包括红/绿/蓝(RGB)图像传感器224。RGB图像传感器可用于获取用于纹理映射的图像数据,如纹理数据226所示。这类纹理映射数据可用于全息通信场景和/或其他可能场景。头显202和/或外设204中的每一个可以可选地包括麦克风228、230。麦克风228和/或麦克风230可以被配置为捕获用户的语音以用于通信会话。
系统200可以与远程计算系统240通信。例如,远程计算系统24可以包括服务器,后者配置为基于从外设204接收的深度数据222和/或纹理数据226以及其他可能的功能来生成全息图像。远程计算系统可以促进在用户之间进行全息通信会话和/或各种其他功能。
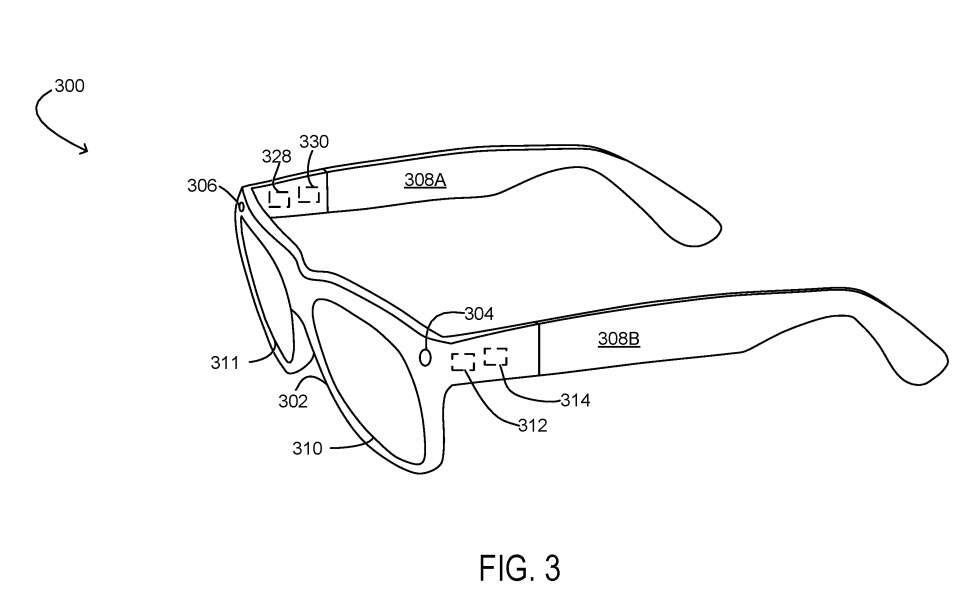
图3示出了示例性的眼镜设备300。眼镜设备300包括框架302、第一摄像头304、第二摄像头306、显示器和镜腿部件308A、308B。在所述示例中,显示器包括由框架302支撑的第一显示器310和第二显示器311,其中第一显示器310及第二显示器311中的每一个采用波导的形式,而波导配置为将投影图像传送到用户的相应眼睛。
第一摄像头304和第二摄像头306分别位于框架302的左侧和右侧,其中第一摄像头和第二摄像头中的每一个位于框架之上,与框架的外边缘相邻。第一摄像头304和第二摄像头306可以作为立体相机对操作以进行间接深度测量。
眼镜设备300同时包括第一显示模块312和第二显示模块328,第一显示模块与第一摄像头304相邻,用于显示立体图像的第一图像。每个显示模块可以包括任何合适的显示技术,例如扫描光束投影仪、microLED、micro

图4示出了眼镜盒外设。当用户不使用AR眼镜时,眼镜盒外设可以用来装AR眼镜。外设400包括飞行时间(ToF)摄像头形式的直接测量深度传感器,其包括ToF图像传感器402和ToF照明器404。尽管图4的外设包括单个深度传感器,但在其他示例中外设可以包括两个或更多个深度传感器。
另外,外设可以包括不同于ToF摄像头的直接深度传感器,例如结构光深度摄像头。ToF摄像头配置为通过测量ToF发射器404发射的光信号的往返行程时间来解析ToF图像传感器402的传感器像素与表面之间的距离。
在一个实施例中,外设400包括可选的RGB强度图像传感器406,其可用于例如获取用于纹理映射的图像数据。在一个示例中,ToF摄像头可以包括RGB图像传感器406的方面。在这样的示例中,ToF摄像头可以包含配置为在IR和可见光模式下成像的摄像头,以在RGB成像的强度模式下以及在深度成像的ToF模式下操作。
通过利用外设为AR眼镜提供进一步的深度信息,AR眼镜可以保持较小的形状参数,并依然获得高精度的深度数据。
MicrosoftPatent|Depthsensingviadevicecase
名为“Depthsensingviadevicecase”的专利申请最初在2021年6月提交,并在日前由美国专利商标局公布。
原文链接:https://news.nweon.com/103613
来源媒体:YiVian







